
An all-European technological system with drones, sensors and a robotic gripper takes action to remove plastic, glass and other submerged waste
In the port of Marseille, SEACLEAR has entered action for the first time, an autonomous underwater robot designed to locate and collect marine waste hidden on the seabed. The device was designed by a group of researchers from the Technical University of Munich (TUM), as part of a European project funded by the European Union and developed in collaboration with several universities.
The idea stems from a concrete urgency: every year, according to the European Environment Agency, approximately 626 million floating objects end up in the sea, but few talk about the waste that sinks and remains there, invisible but present, for years. SEACLEAR was created to address precisely this hidden part of marine pollution.
A team of robots and sensors works together to collect submerged waste
The SEACLEAR robot doesn’t work alone. It’s part of an integrated system composed of a support vessel, an aerial drone, an underwater explorer robot, and finally, a collector robot equipped with a gripper. Each element has a very specific task.
The vessel, for example, is responsible for mapping the seabed and transmitting power and data to the robots via a cable. The drone and explorer robot serve instead to locate waste with precision, even in murky waters, thanks to the combined use of cameras and sonar. Once located, artificial intelligence comes into play, which transforms the images into 3D models to understand where to grasp objects without damaging them, as explained by Stefan Sosnowski, one of the researchers involved in the project:
We installed a camera and sonar to orient the robot even in conditions of poor visibility.
During the testing phases, the system processed over 7,000 images to refine the recognition and grasping of objects.
A gripper with 4,000 newtons collects objects up to 550 lbs without breaking them
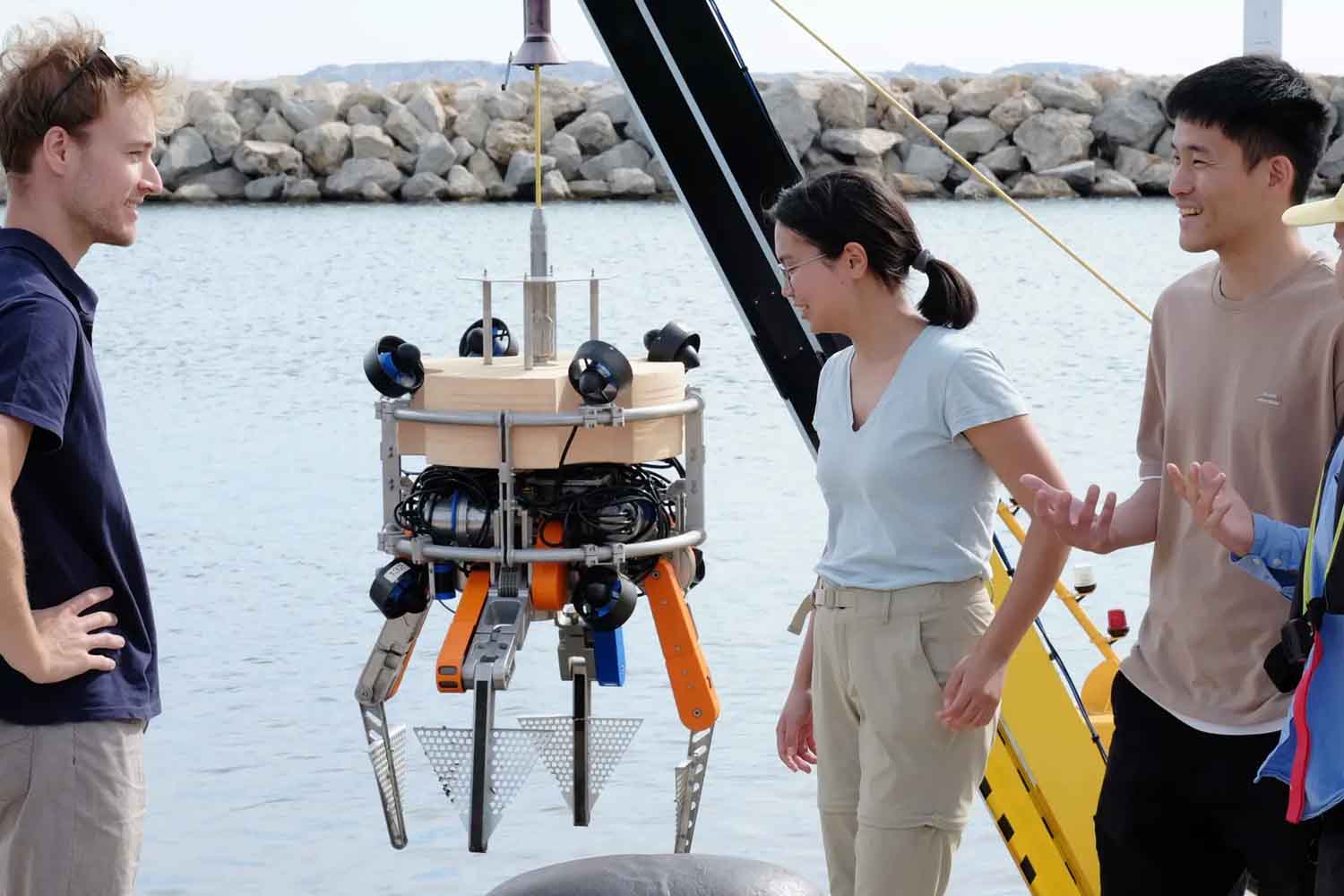
The operational heart of the SEACLEAR system is the collector robot, equipped with a four-fingered mechanical gripper capable of exerting a force of 4,000 newtons. It can collect objects up to 250 kilograms (550 lbs) without breaking them, even when dealing with fragile materials like glass. This is thanks to a series of force sensors that modulate the grip to avoid breakage.
The robot moves underwater thanks to eight turbines and is connected to the vessel via a multifunctional cable, which provides electrical power and data connection. This allows not mounting batteries on board, avoiding the autonomy limits that, according to the team, would not have exceeded two hours.
To stabilize in water, the robot is surrounded by 120 kg (265 lbs) of floating material, a simple but effective solution to maintain position when the turbines are not in operation. This helps it work with precision, even in non-ideal conditions.
The test carried out in the port of Marseille showed good results, paving the way for the creation of a real fleet of underwater robots capable of operating autonomously in different European seas.
The SEACLEAR 2.0 project involves, in addition to TUM, also the Fraunhofer CML, TU Delft (Netherlands), the University of Dubrovnik (Croatia), and the Technical University of Cluj-Napoca (Romania). The objective is clear: to develop automatic systems that can systematically collect submerged waste, with minimal environmental impact.
An important step forward for the protection of marine ecosystems, often compromised by waste invisible to the eye but lethal for underwater fauna and flora.
Source: tum.de